SAVE 5% OFF YOUR FIRST ORDER
Use discount code FIRSTLEGENDS at checkout.
EXCLUSIVE DISCOUNTS AVAILABLE
Military, First Responders & Students Learn More
About this item
Faites passer votre tournage de drone au niveau supérieur avec le kit de cadre freestyle Luma 55. Offrant des performances et une durabilité supérieures, il vous permet de repousser les limites des quadricoptères traditionnels et de capturer des visuels époustouflants comme jamais auparavant. Le 5,5" offre une poussée et des performances supplémentaires au-delà de ce qu'un 5" standard peut offrir, pour accueillir les caméras GoPro plus lourdes que nous aimons et utilisons maintenant. Le Luma 55 atteint un équilibre parfait entre l'agilité d'un drone freestyle de 5 pouces et la sensation de stabilité d'un cruiser cinématographique de 6 pouces, créant un mélange harmonieux de vitesse et de stabilité parfait pour le travail cinématographique. Avec le Luma 55, vous pouvez suivre sans effort des sujets en mouvement rapide tels que des voitures, des bateaux et des motos en dérive, capturant des images époustouflantes avec précision et facilité.
Compatible avec l'unité aérienne HD VISTA / Analogique / DJI O3
Bras remplaçables 6x8 mm. (conception unique)
Montage de la pile principale avec amortissement des vibrations
Le support de montage pour la nouvelle caméra Air Unit 03 ainsi que pour d'autres caméras FPV de taille MINI à Nano
Cadre en carbone T300
Boulons de quincaillerie en acier de qualité YFS 12.9
Ensemble complet d'impressions 3D pour votre quad
Caractéristiques
Montage en pile : 20x20mm
Montage arrière : 20x20mm et 25,5x25,5mm
Modèle de montage du moteur : 16x16 et 19x19 mm (M3)
Épaisseur de la plaque intermédiaire : 2 mm
Épaisseur de la plaque supérieure et inférieure : 2,5 mm
Moteur à moteur : 245,7 mm
Épaisseur du bras : 6 mm
Poids du cadre avec TPU : 160 g
Comprend
1x Kit cadre freestyle Luma Quads Luma 55 5,5"
1x Kit de quincaillerie
1x Ensemble d'impression 3D
2x sangles Luma Lipo
Réglage officiel du PID Betaflight 4.4 de Luma 55
L'équipe Luma est fière d'apporter à tous les pilotes de Luma 55 un nouveau réglage Betaflight pour 4.4 !
En plus des améliorations apportées au sauvetage GPS et à l'intégration HD, la version 4.4 a subi une refonte complète du contrôleur PID, ce qui signifie qu'un nouveau réglage était nécessaire pour permettre des performances optimales. Tout comme le réglage précédent pour Betaflight 4.2, ce réglage révisé a été réalisé en collaboration avec nul autre que le pilote de l'équipe Luma Joseph Webb (autrement connu sous le nom de JWebb FPV), et a été poussé à ses limites absolues. Joseph est une véritable légende dans l'industrie australienne des drones. Connu pour ses incroyables compétences de pilotage freestyle et son expertise inégalée dans le développement de réglages Betaflight, il est un contributeur précieux à notre mission de créer les produits les plus remarquables pour l'ensemble de notre communauté.
- Ce morceau a été développé en utilisant des moteurs de taille 2306.5. - Pour permettre des performances optimales, nous recommandons d'installer un condensateur Low ESR 1000μF 35V, ainsi qu'une diode TVS.
- Assurez-vous de croiser les valeurs après le vidage CLI avec les captures d'écran ci-dessous (mieux vaut prévenir que guérir !)
- Les filtres n'ont pas été modifiés pour garantir une bonne continuité entre les différentes versions. Si vous souhaitez obtenir plus de performances ou tenter de corriger un problème, ajoutez plus ou moins de filtrage via les curseurs selon vos besoins.
- Assurez-vous de tester le Luma 55 dans une zone sûre et vérifiez la température du moteur après 20 à 30 secondes. S'ils sont chauds au toucher, NE CONTINUEZ PAS - assurez-vous que la construction est conforme et si le problème persiste, contactez-nous et nous ferons de notre mieux pour vous orienter dans la bonne direction
Merci pour votre soutien continu.
CLAUSE DE NON-RESPONSABILITÉ:LumaQuad n'est pas responsable des dommages mécaniques causés à votre configuration personnelle - ce réglage a été testé et vérifié sur plusieurs configurations pour garantir qu'il est sans danger pour les clients .
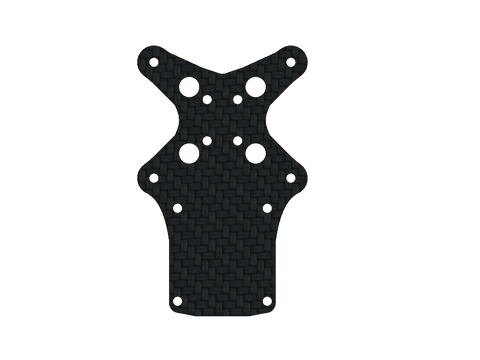
C'est la plaque médiane. Notez l'encoche en haut de l'image, cela indique l'arrière du cadre.
C'est la plaque inférieure. Il n'a pas d'encoche et l'extrémité plate en bas indique l'avant du cadre.
Installez les écrous à pression 8x dans les trous 8x de la plaque centrale comme suit.
Regardez la vidéo suivante dePhaseur FPVPour une installation correcte, appuyez sur les écrous dans la plaque centrale en carbone.
N'UTILISEZ PAS DE MARTEAU !
Installer la pile principale Gummies :
Regardez la vidéo suivante pour connaître la manière correcte d'installer les Gummies dans la plaque médiane en carbone à l'aide de fil dentaire ou de fil de pêche.
La vidéo montre l'installation dans un FC/ESC.. cecila technique est la même pour le carbone.
Insérez 8 boulons à tête cylindrique M3 de 12 mm dans la plaque inférieure.
Remarque : une seule conception est utilisée pour les 4 bras.
Orientez-les de manière à ce que les coins arrondis soient en haut et en bas et que les coins les plus pointus soient sur les côtés.
Fixez chaque bras à la plaque inférieure à l'aide des boulons de 12 mm.
Placez la plaque centrale sans la serrer dessus.
Retournez le cadre et ramassez tous les boulons que vous avez laissé tomber ;)
Répétez plusieurs fois jusqu'à ce que l'ensemble soit homogène.
Une fois que tout est bien verrouillé et carré, vous pouvez faire le tour et lui donner un dernier serrage.
Prenez 4 boulons de 10 mm, 2 rondelles M3 et l'impression du pare-chocs avant.
Installez les rondelles sur les deux boulons avant et insérez-les à travers le pare-chocs dans le bas de la plaque inférieure.
Fixez avec 4 entretoises de 28 mm.
Insérez vos supports de caméra FPV sur les 2 entretoises avant.
Prenez 2 boulons de 8 mm et faites de même pour les 2 trous arrière, en utilisant 2 entretoises de 20 mm pour fixer.
Insérez le support d’antenne arrière sur les entretoises arrière.
Insérez 4 boulons M3 de 20 mm dans les gummies de la pile principale, tournez doucement et lentement pour ne pas faire sortir les gummies.
Utilisez des entretoises de pile si nécessaire pour ajouter un peu d'espace afin que votre ESC soit à l'écart des écrous de presse et du carbone.
Installez la plaque supérieure, triangle pointant vers l'avant.
Prenez 4 boulons M3 de 10 mm, 4 rondelles M3 et le support d'impression HD.
Insérez les 4 boulons à travers les 4 rondelles dans la partie supérieure du support et fixez-les aux 4 entretoises de 28 mm.
Utilisez 2 boulons M3 de 8 mm pour les deux trous arrière.
Alignez le tampon Lipo avec le triangle et collez-le sur la plaque supérieure
Insérez l'écrou M5 Clinch dans l'impression du support HD.
Remarque : l'écrou se placera à l'intérieur de la lèvre de l'impression et ne tombera pas si vous le placez correctement, utilisez un peu de force pour le faire passer au-delà de la lèvre.
Les pare-chocs de bras se placent à l'extrémité des bras.
Les protections de fil du bras imprimé recouvrent les fils du moteur et sont fixées avecruban électrique .

























 Caractéristiques
Caractéristiques